
Le différentiel
Le différentiel pour véhicule a été inventé par Onésiphore Perqueur en 1827.

Dans un véhicule automobile, il est nécessaire que les roues motrices puissent tourner à des vitesses différentes dans un virage,
sans que s'interrompe la transmission aux roues du couple moteur. Le différentiel répond à cet impératif.
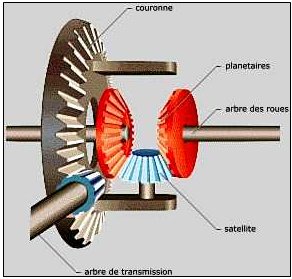
Il comprend 4 engrenages coniques :
2 planétaires, solidaires chacun d'un demi-arbre de roue et 2 satellites montés sur un arbre solidaire d'une cage d'écureuil
(tournant autour de l'axe des demi-arbres), et qui transmettent aux planétaires le couple moteur que reçoit la cage d'écureuil
(par l'intermédiaire d'une couronne dentée), de façon que le couple se divise en deux, quelle que soit la vitesse relative des deux demi-arbres.
Les différentiels attaquent les deux demi-arbres entraînant respectivement les roues motrices droite et gauche, par l'intermédiaire de deux engrenages coniques, ou planétaires, montés à leurs extrémités. Ces deux planétaires sont placés à l'intérieur d'une cage rotative solidaire du mouvement à transmettre, provenant du moteur. Cette cage porte plusieurs engrenages coniques, ou satellites, en prise avec les planétaires (leurs axes sont perpendiculaires). Lorsque la cage tourne et que la voiture est engagée en ligne droite, l'ensemble constitué par la cage, les satellites et les planétaires se comporte comme un ensemble monobloc : les satellites suivent le mouvement de la cage mais ne tournent pas sur eux-mêmes, les deux planétaires tournent à la même vitesse. Si la voiture s'engage dans un virage, les trajectoires suivies par les deux roues motrices sont différentes et leur adhérence sur le sol les oblige à tourner à des vitesses également différentes. Les satellites tournent alors sur eux-mêmes. Le mouvement de la cage est toujours transmis aux planétaires, mais la rotation des satellites permet d'adapter le dispositif aux vitesses de rotation différentes des roues, dont la moyenne arithmétique reste alors égale à celle de la cage.
L'inconvénient principal d'un tel dispositif est que la perte d'adhérence d'une roue (patinage ) entraîne l'immobilisation du véhicule. La roue qui patine accélère, en effet, jusqu'au double de la vitesse de la cage, et la roue qui ne patine pas s'arrête. Cela explique l'apparition, surtout chez des véhicules destinés à des conditions d'utilisations difficiles, de différentiels plus complexes qui, en cas de début d'accélération intempestif d'une roue, sont autobloquants.
Etant donné le parcours différent des roues motrices dans les tournants, on divise l'arbre d'entraînement des roues motrices en deux segments qui peuvent être entraînés indépendamment l'un de l'autre par le différentiel. Le différentiel se compose d'une cage, de 2 satellites et de 2 pignons coniques d'entraînement des demi-arbres de roues.
Les satellites sont en prise constante avec les pignons coniques d'entraînement des demi-arbres de roues. En ligne droite, les satellites ne tournent pas. Dans un virage, les satellites permettent au pignon conique intérieur au virage de tourner d'autant plus lentement que l'autre tourne vite.
Le differentiel sera évidemment placé sur l'essieu moteur actionné par le moteur. Dans un quatres roues motrices, un minimum de 2 différentiels sont nécessaires; dans un 4X4 permanent, un troisième, appelé différentiel central ou inter-ponts, est nécessaire pour compenser les différentes vitesses de rotation entre l'essieu avant et arrière.
Mais si une roue patine à cause du différentiel, l'autre ne transmettra pas de force de traction.
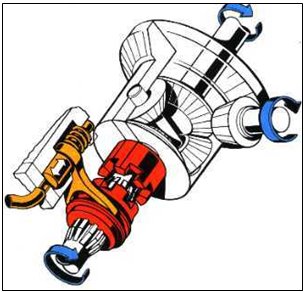
C'est pour cela qu'il existe sur certains véhicules, notamment les poids-lourds, un blocage de différentiel, comme représenté ci-dessus.
Voici ci-dessous une vue éclatée d'un Limited Slip Differential (LSD), Différentiel à glissement limité.

Site web sans copyright, à utiliser largement !
Pour contacter l'administrateur de ce site, suivez ce lien